There are many ways that magnetic power can be measured (Gauss, Tesla, Holding Force, Pickup Height) and these metrics are useful for assessing the power of magnets comparatively. However, none of these metrics are perfectly applicable to real world conditions that you will use a magnetic sweeper in because they fail to factor speed into the equation.
Therefore, we developed a methodology of testing magnetic sweepers at speed in a controlled environment with various debris types to showcase the capabilities of our magnetic sweepers and help you decide what magnet will be sufficient for the job at hand.
For each debris type and sweeping height we estimated the speed required for a 100% pickup rate to serve as a starting point for our testing of a magnetic sweeper. The magnetic sweeper being tested was then tested at this sweeping height, and at this speed for one debris type at a time. Each debris type was tested separately.
Based on the results obtained, speed was reduced or increased accordingly, and the test ran again in succession, until finally we were able to determine at which speeds the magnetic sweeper would pick up 90% and 100% of the debris at this sweeping height. The same process was repeated for different sweeping heights.
The following image shows a top-down view of the debris mat where debris clusters were positioned marked in red on the grid. A picture of the actual mat used in testing is shown in the photo above.
To see the full testing methodology please see Magnet Speed Testing Methodology (pdf)
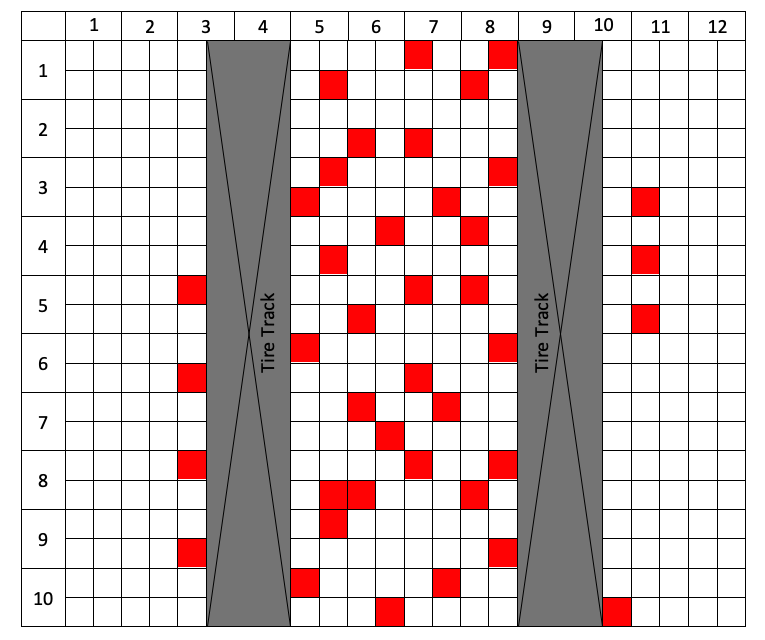
One debris type was tested at a time. The amount of debris listed in the table below was placed in each red square on the debris mat. For example, when testing Nails (2 ½”), 5 nails were placed in each of the red squares on the mat. The magnetic sweeper was then pulled at speed over the mat.
| Debris Type | Amount of Debris in Each Red Square |
|---|---|
| Nails (2 ½”) | 5 x Nails |
| Bolts (1/2-13 x 3” hex bolts) | 1 x Bolt |
| Nuts (1/2-13) | 2 x Nuts |
| Metal Strips (approximately 8”) | 1 x Strip |
| Wire Scraps (approximately 7”) | 2 x Strands |
| Ball Bearings (Ø3/16 – Ø3/4) | 2 x Bearings |
| Railway Spikes | 1 x Spike |
Nails were placed in groups of 5 in scattered positions on the surface of the debris mat and driven over with the Piranha magnet at different speeds and heights settings. The following graph shows the speeds and sweeping heights necessary for 100% debris collection.
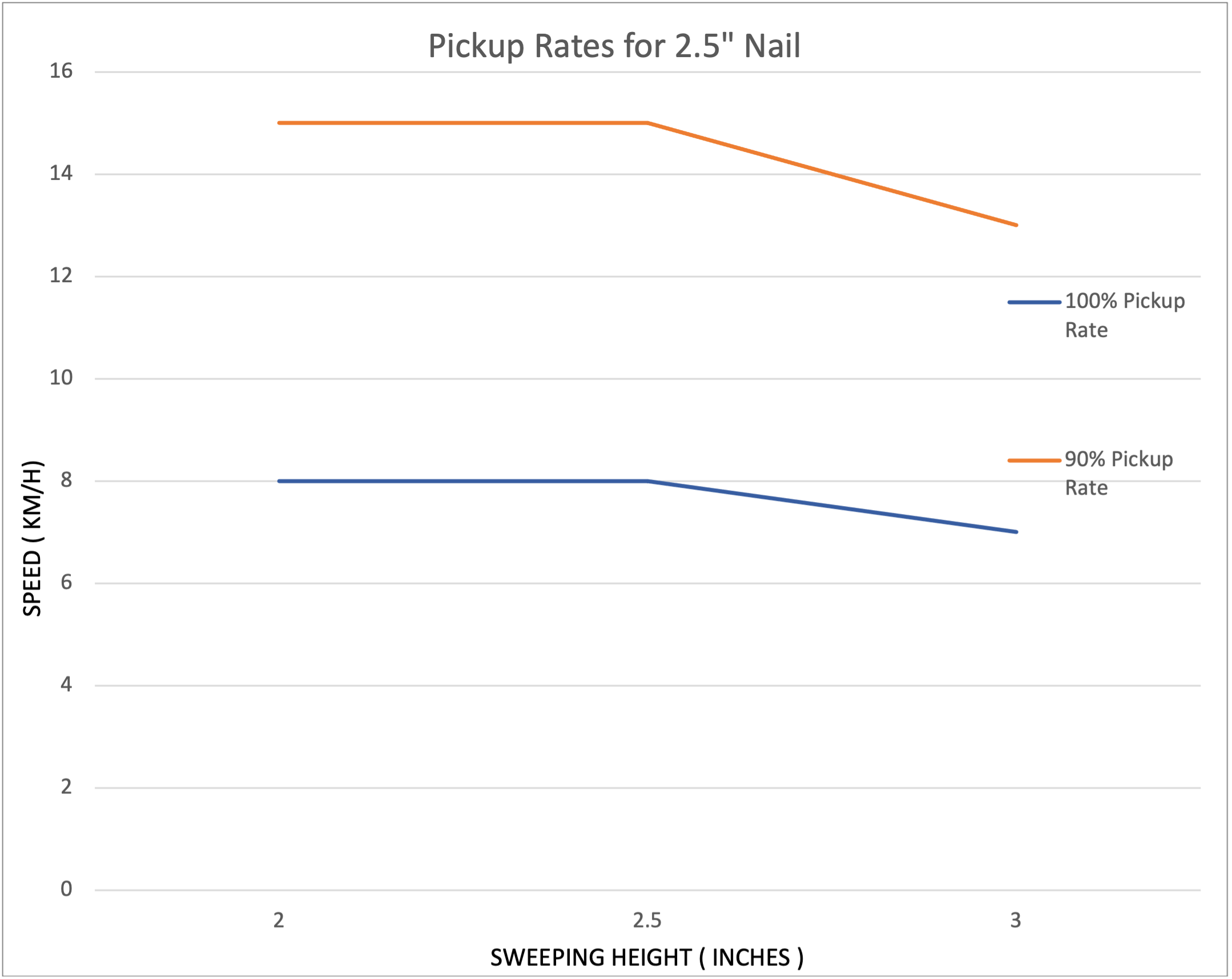
Conclusion
The nails were able to be picked up at reasonable speeds, however, when the sweeping height was less than the length of the nail, the nails were able to get stuck in the rubber debris mat. Due to this issue, there is no data for less than 2.5” sweeping height. We can assume that on a smooth surface where the nails can’t get stuck in a mat the magnet will perform at the 2” inch height at least as well as the next greatest sweeping height of 2.5” therefore the data for a 2” pickup height is the same as the data for the 2.5” pickup height . The video below shows an example of this test.
In this test the ½” x 3” bolts were arranged onto the debris mat in a random layout in the red squares, the bolts were then driven over with the magnetic sweeper with each of the speed and height settings. The chart below shows the speed and height settings that yield 90% pickup rate.
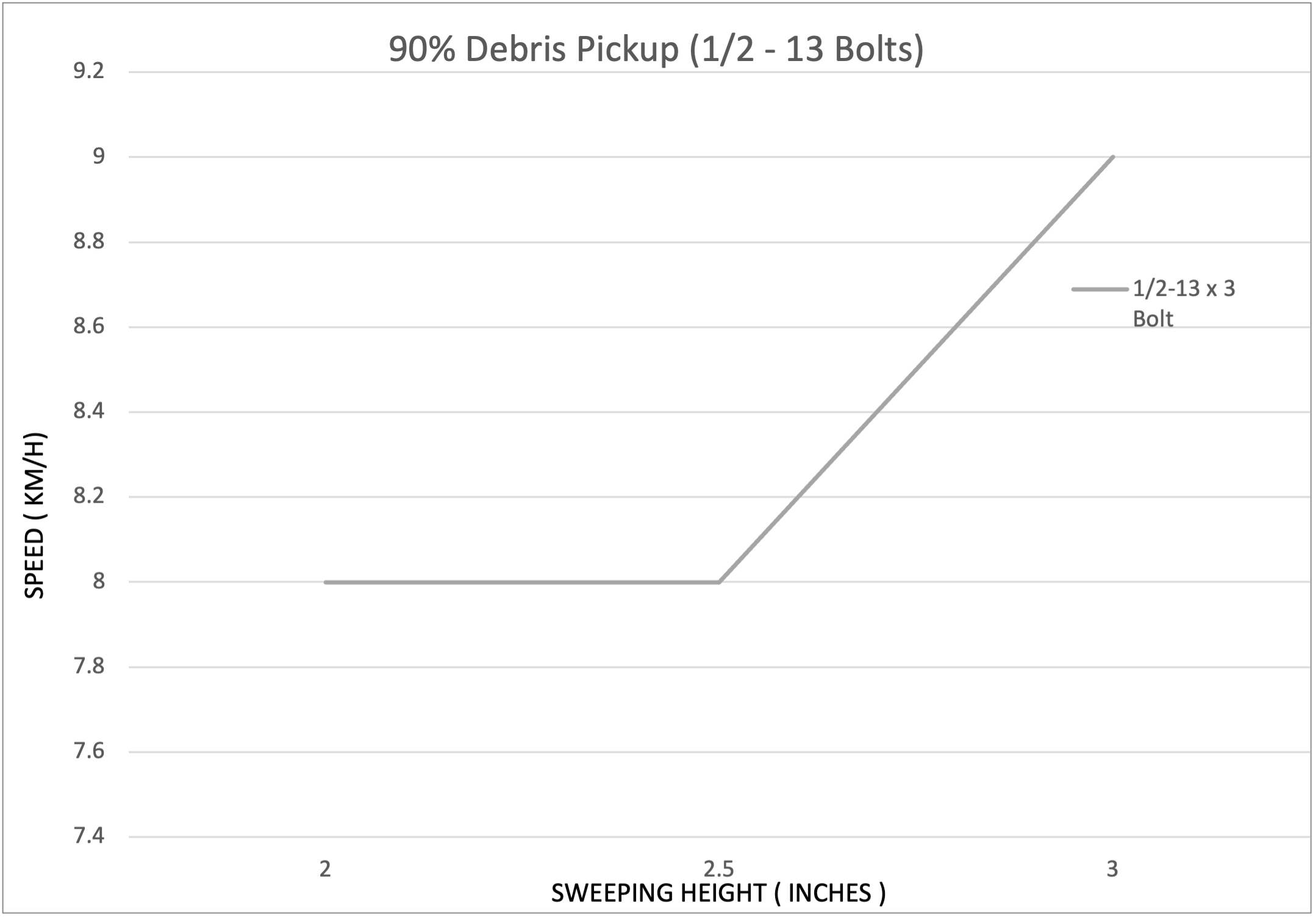
Conclusion
There was no test in which 100% of bolts were picked up, this is due to the 4 inch gap between magnets on the Piranha. The 2.5 inch sweeping height did not perform as well as 3 inches because bolts got wedged between the magnet and the ground and were able to be forced from the magnet.
In this test the ½” nuts were arranged in pairs in a random pattern on the debris mat in the red squares and then driven over with the piranha sweeper at each of the speed and height settings. The chart below shows the height and speed settings that yield 90% pickup rate.
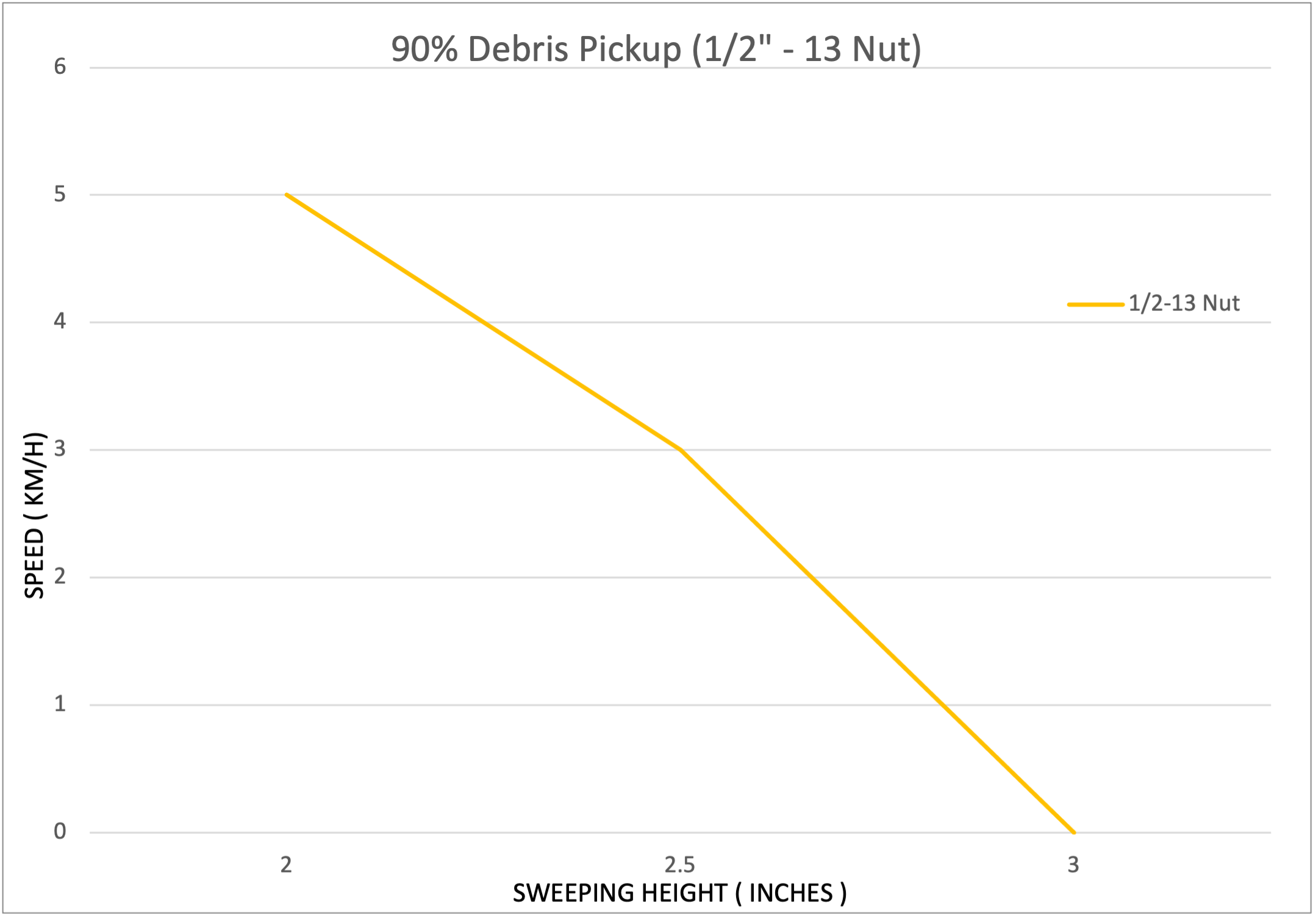
Conclusion
The geometry of steel nuts makes them very difficult to pick up except at low speeds and low sweeping heights. There was no test in which 100% of nuts were picked up. The gap between magnets also contributes to this performance deficiency.
In this test 8” metal strips were arranged in random patterns on a debris mat, they were then driven over with the magnetic sweeper in each height and speed setting. The following chart shows the speed and height settings required for 90% & 100% debris collection rates.
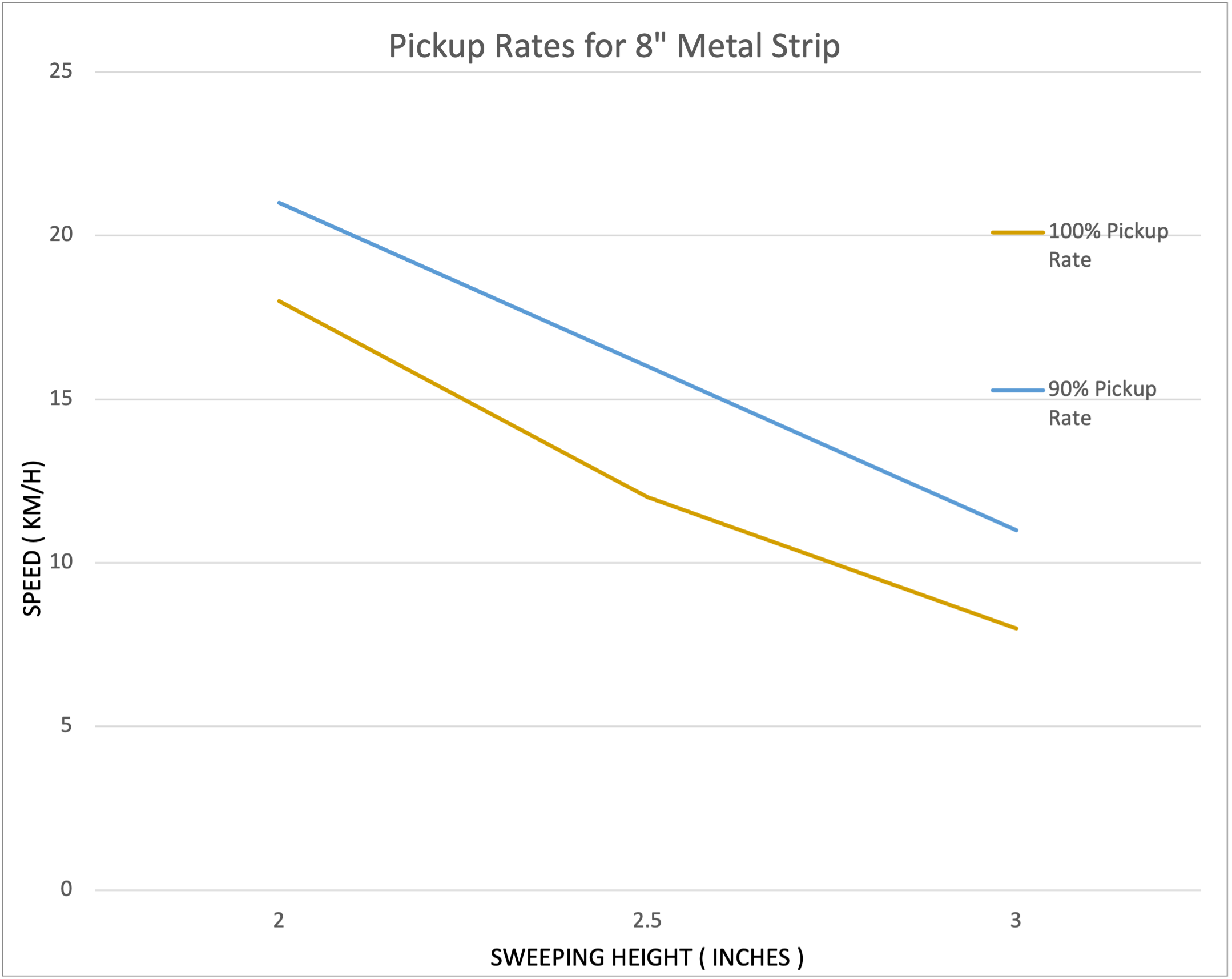
Conclusion
The 8-inch metal strips were relatively easy to pick up. The weight is spread over a large area and it the strips were long enough to bridge the gap between magnets. If a metal strip in the centre of the mat was oriented parallel to the direction of travel and in the gap between the magnets it would not be picked up.
In this test the 7” wire scraps were arranged in pairs in a random pattern on the debris mat and then driven over with the piranha sweeper at each of the speed and height settings. The chart below shows the height and speed setting that yields 90% & 100% pickup rates.
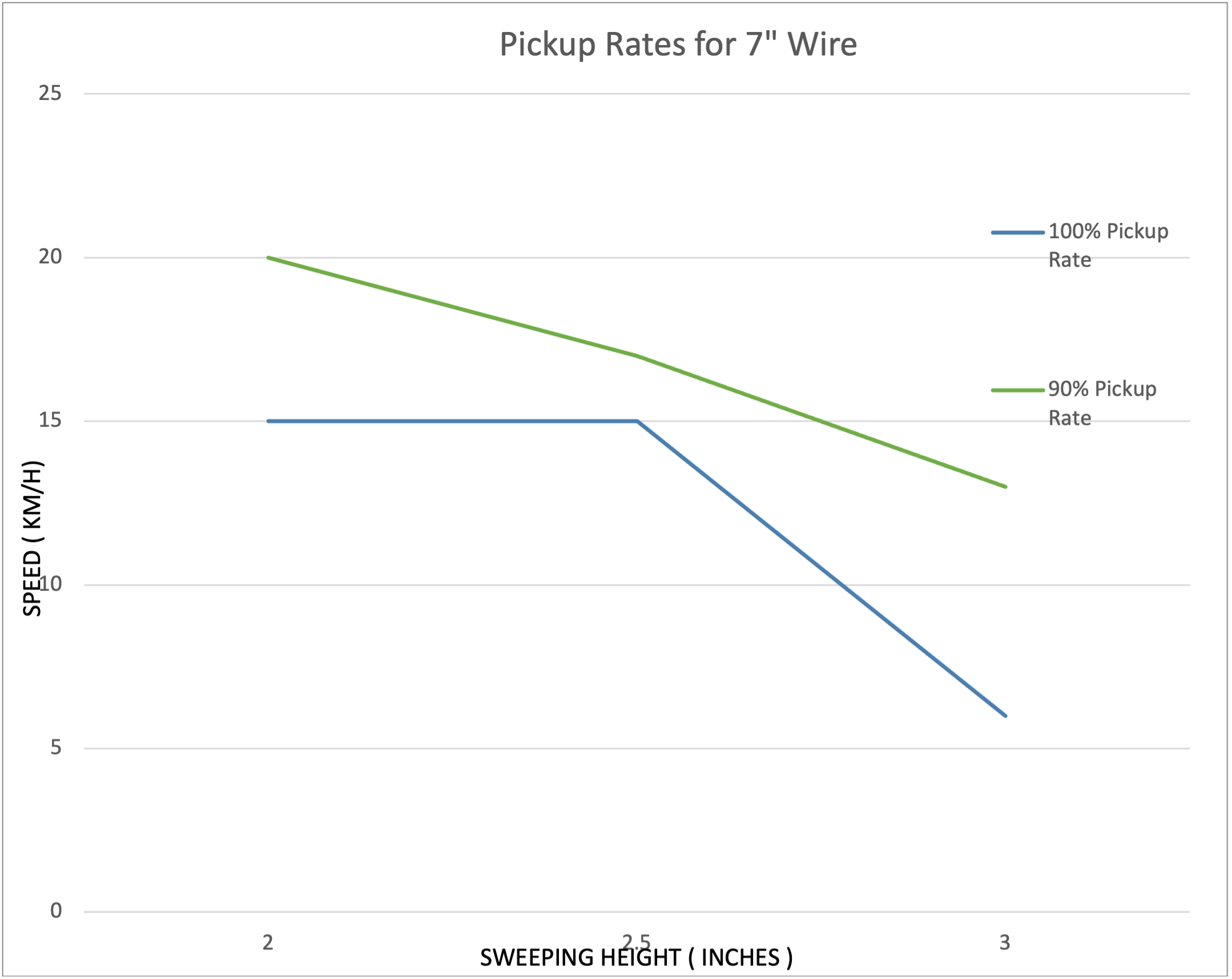
Conclusion
The wire was slightly harder to pick up than the metal strips. The wire has a much smaller cross-sectional area but was light enough to be picked up easily. Similar to the metal strips, wire in the centre of the mat would not be picked up if it was oriented parallel to the direction of travel and in the gap between the magnets on the Piranha.
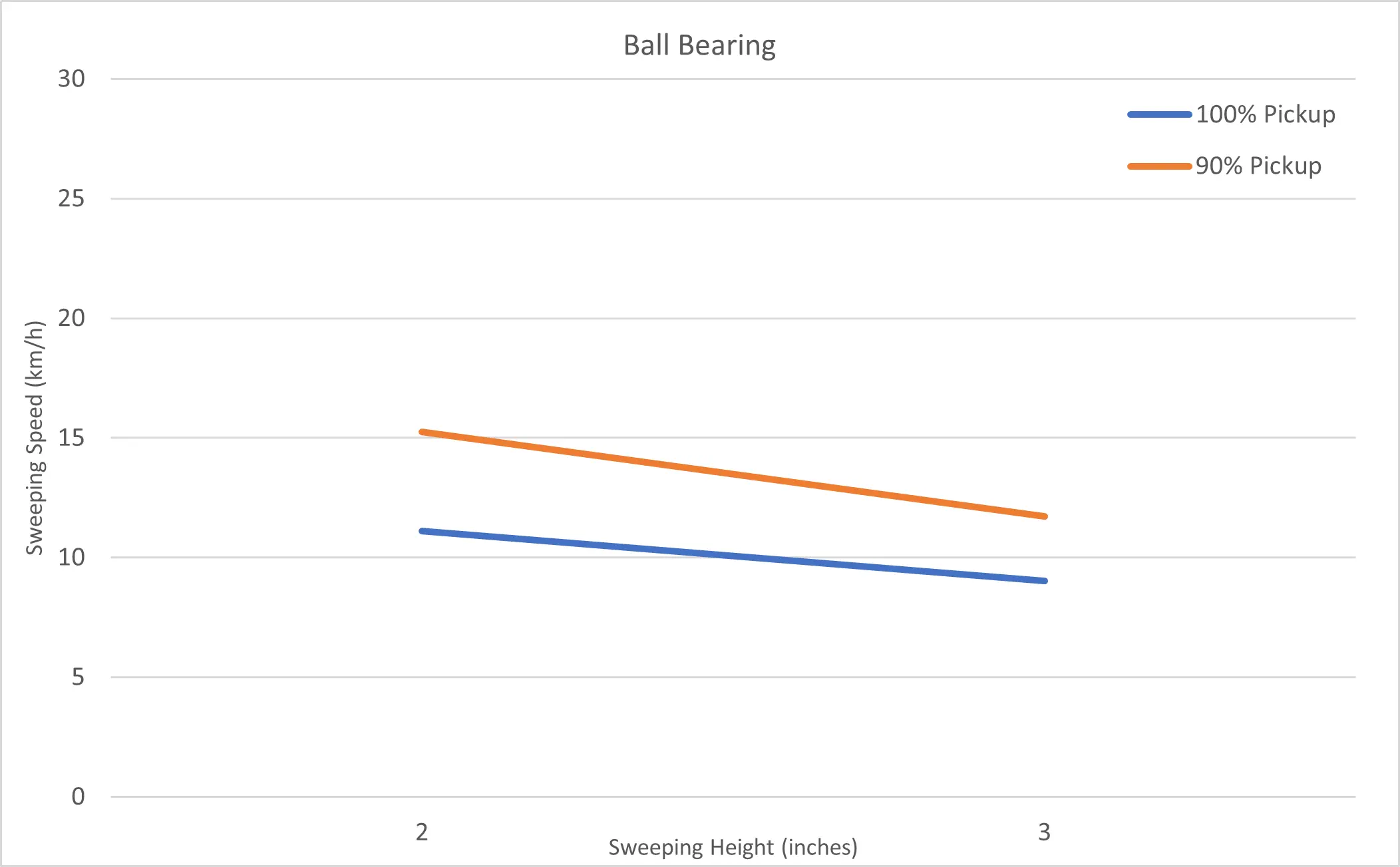
In this test the ball bearings ( 3/16” & 3/4”) were arranged in pairs in a random pattern on the debris mat in the red sqa and then driven over with the piranha sweeper at each of the speed and height setting. The chart below shows the height and speed setting that yield 90% pickup rate.
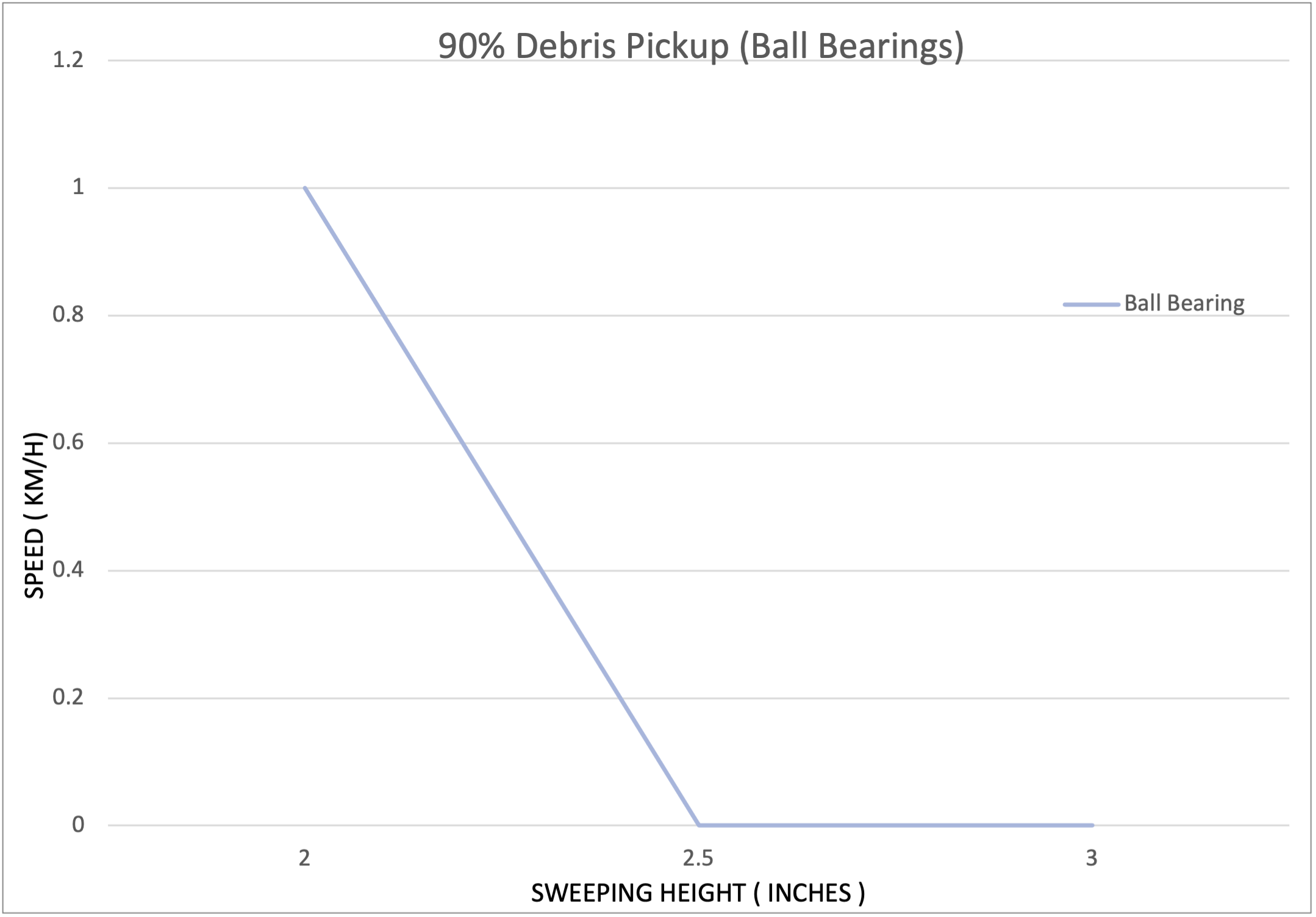
Conclusion
Ball bearings were the most difficult debris to pick up with the Piranha. The weight is more concentrated than the nuts and most of the balls were smaller than the nuts. The only time enough balls were picked up was when sweeping at approximately 1km/h.
Mammoth
Mammoth Magnetic Sweeper Testing Results

The Mammoth magnetic sweeper was designed and built with input from partners in the mining industry to retrieve nickel and steel balls that are used in semi – autogenous ball mills to break down material into useable ore.
These balls get lost in this process and have to continually be replaced, for this reason the Mammoth was created to retrieve the abrasive materials so they can be put back into the mill and re-used.
In this test the ball bearings (3/16” & 3/4”) were arranged in pairs in a random pattern in the red squares on the debris mat and then driven over with the Mammoth sweeper at each of the speed and height settings. The chart below shows the height and speed setting that yield 100% & 90% pickup rate.
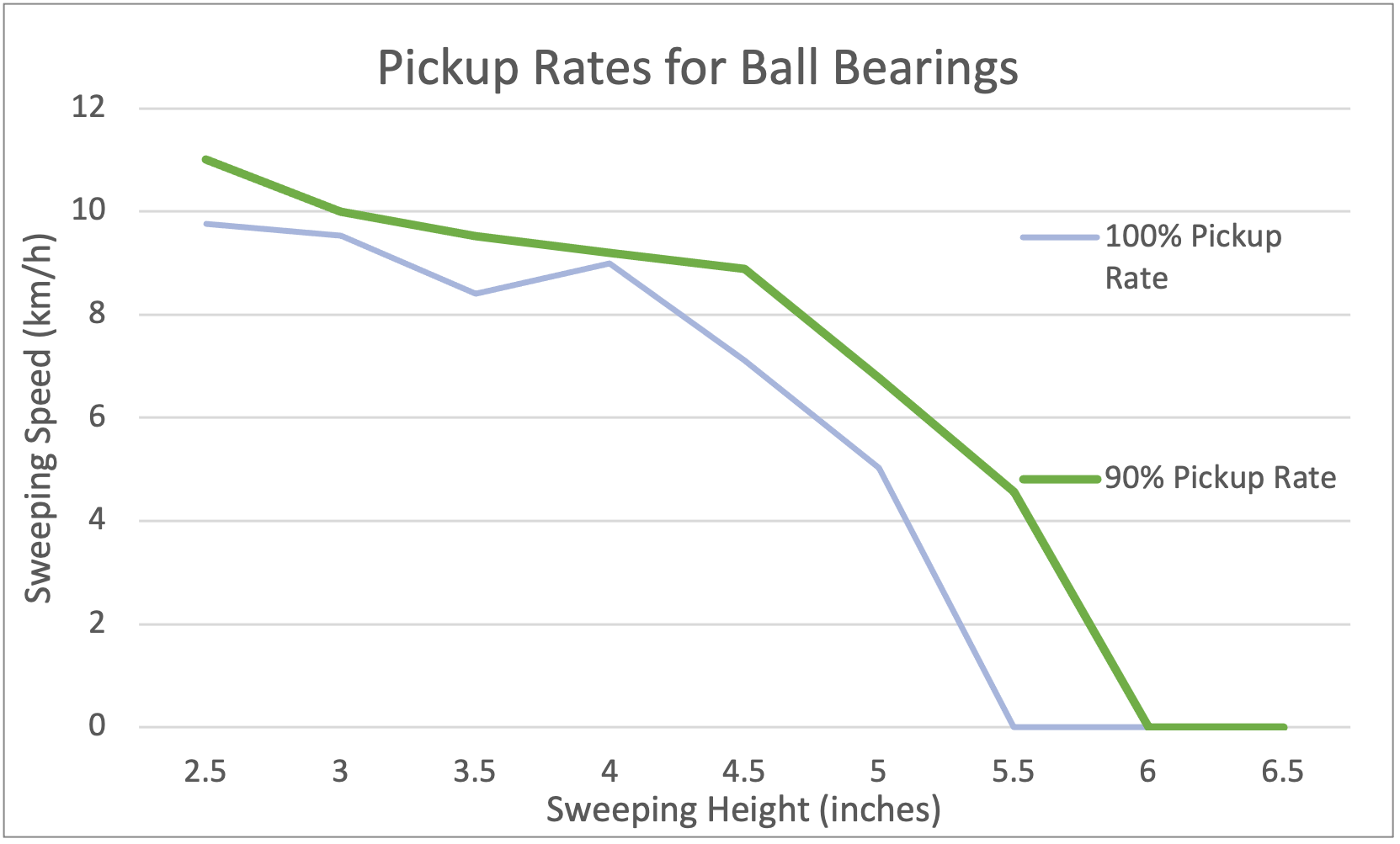
Conclusion
The cross-sectional ferritic composition of these abrasive steel balls makes them difficult to retrieve using a magnet, however since the Mammoth has such a powerful magnetic assembly, 100% pickup rate is possible at speeds up to 9.8km/h.
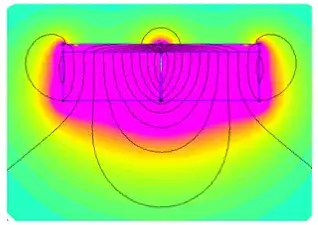
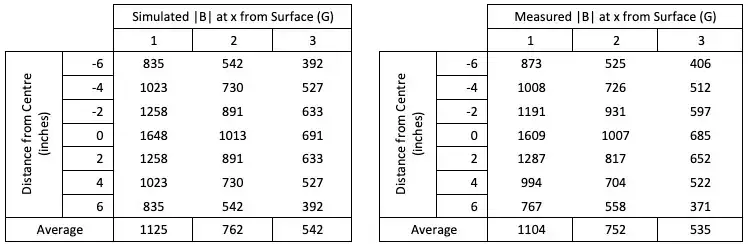
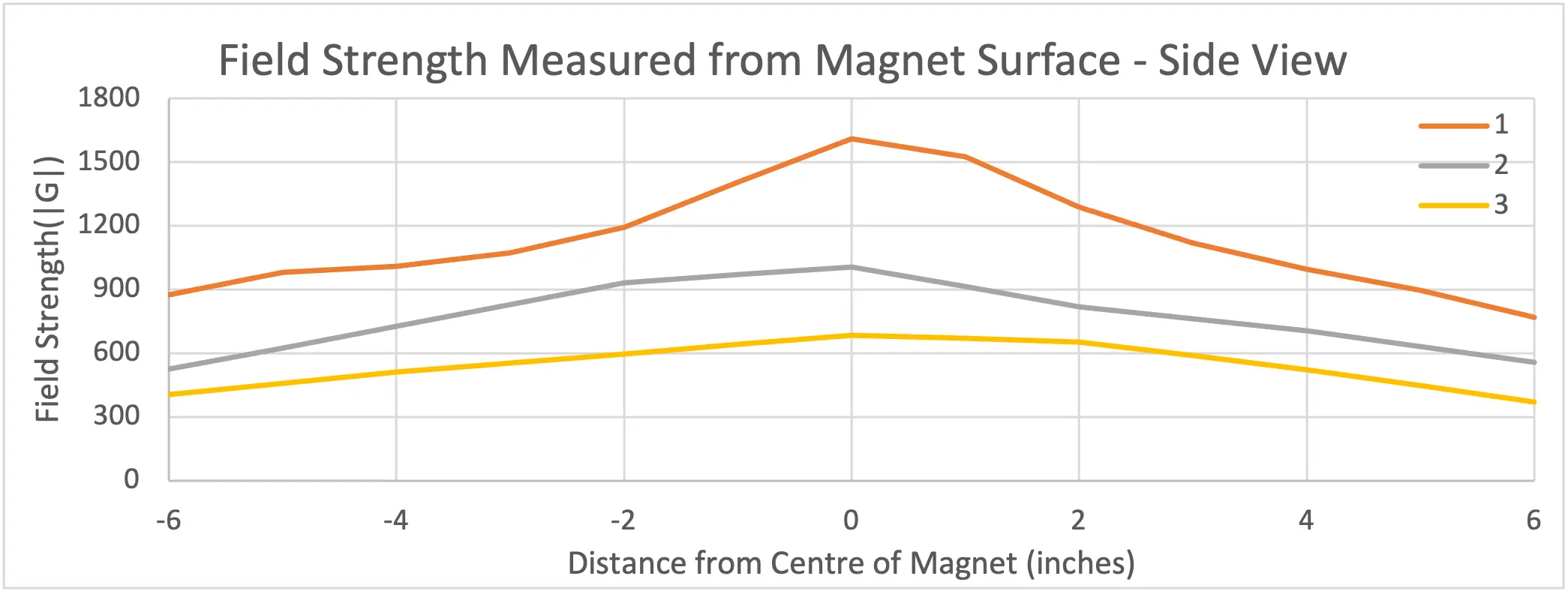
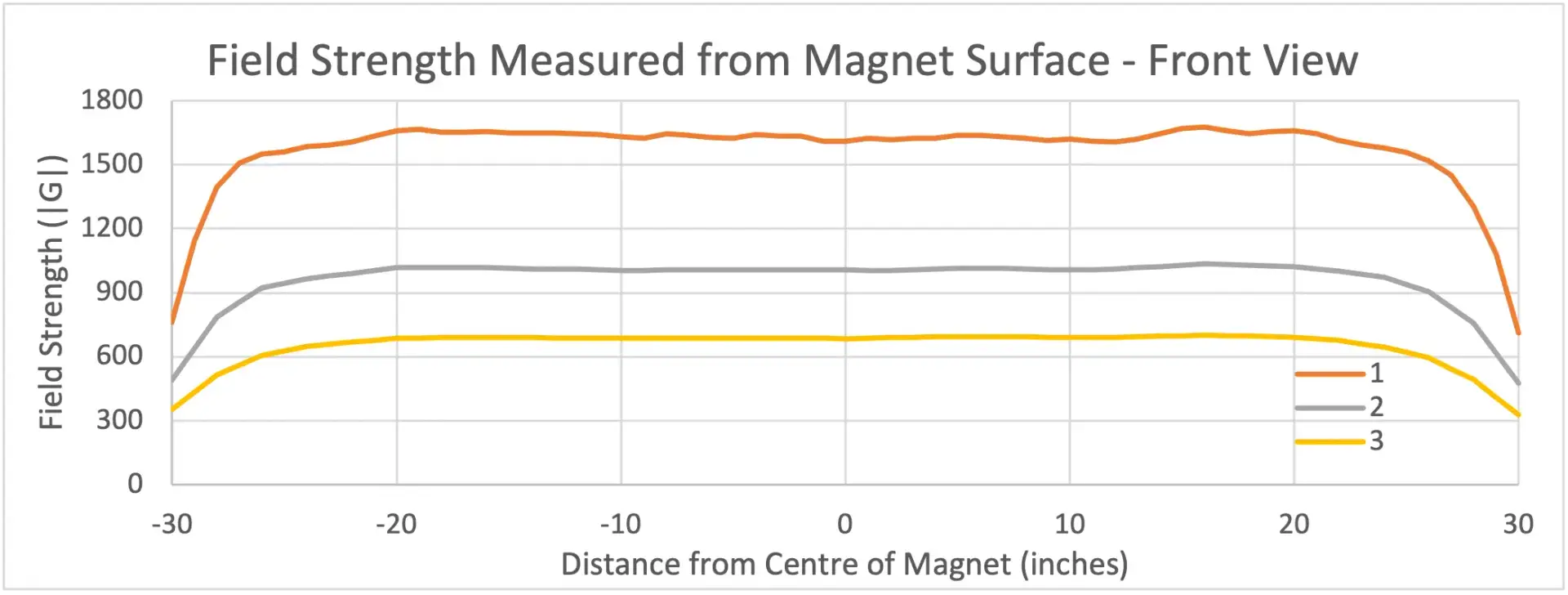
Magnetic Field Measurements
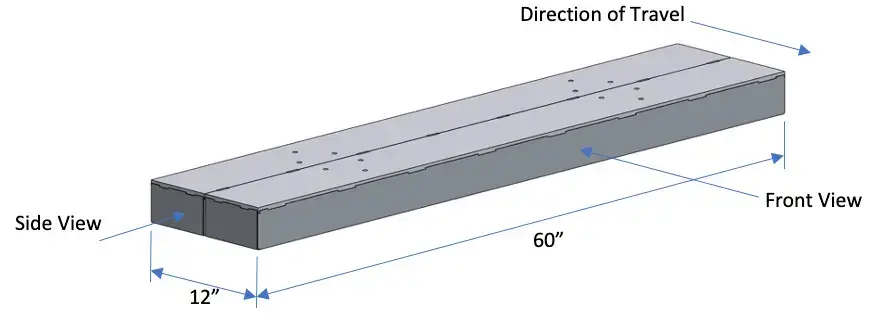
The directions of the arrows on the following photo indicate the direction of how the gauss measurements indicated in the following charts were taken relative to the position on the magnet housing (left to right and front to back).
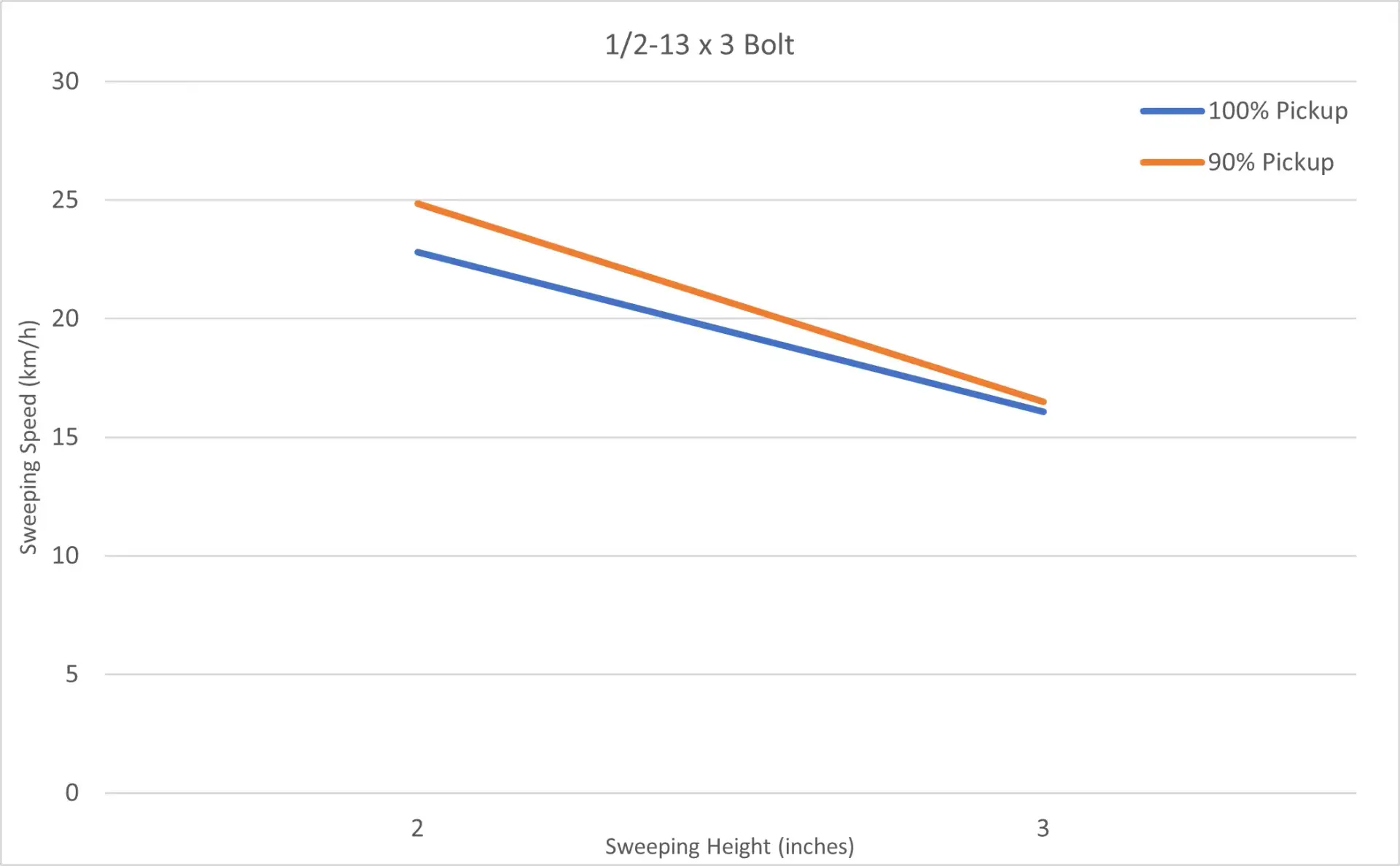
Bolts were able to be picked up at relatively high speeds. In previous testing bolts got stuck between the magnet and the ground, this did not happen with the Seeker magnet, possibly due to the stronger field in the centre of the magnet.
| 2” | 3” | |
| 100% | 22.8 km/h | 16.1 km/h |
| 90% | 24.9 km/h | 16.5 km/h |
Table 4: Speed to Pickup 100% and 90% of ½-13 x 3 Bolts (km/h)
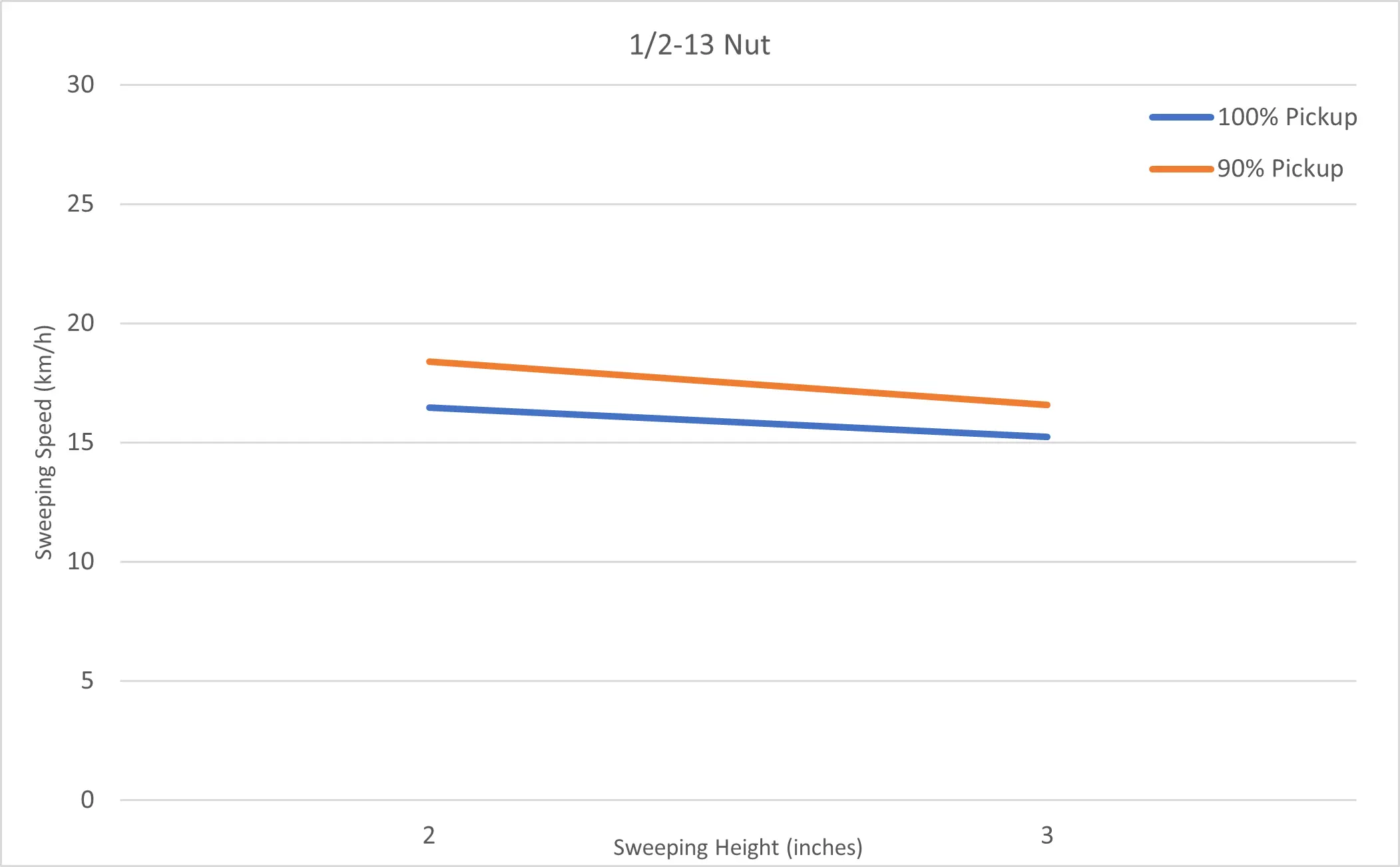
The nuts were more difficult to pickup than the bolts due to the concentration of mass. Sweeping at 1” was attempted, however, the sweeper crossed over a bump and some collected nuts were wiped off.
| 2” | 3” | |
| 100% | 16.5 km/h | 15.2 km/h |
| 90% | 18.4 km/h | 16.6 km/h |
Table 5: Speed to Pickup 100% and 90% of ½-13 Nuts (km/h)
The wire samples were relatively easy to collect, however, in some cases the wire would get caught on the carpet that is used to place debris. The sweeper was able to collect all debris samples at just over 20km/h.
| 2” | 3” | |
| 100% | 21.6 km/h | 21.4 km/h |
| 90% | 25.5 km/h | 23.3 km/h |
Table 6: Speed to Pickup 100% and 90% of 7” Wire Strips (km/h)
Like nuts, ball bearings are very difficult debris to collect due to their geometry. The horseshoe configuration of the magnet combined with the length in the direction of travel allowed the sweeper to collect all samples at about 10km/h.
| 2” | 3” | |
| 100% | 11.1 km/h | 9.03 km/h |
| 90% | 15.2 km/h | 11.7 km/h |
Table 7: Speed to Pickup 100% and 90% of Ball Bearings (km/h)